约束规划
阐述
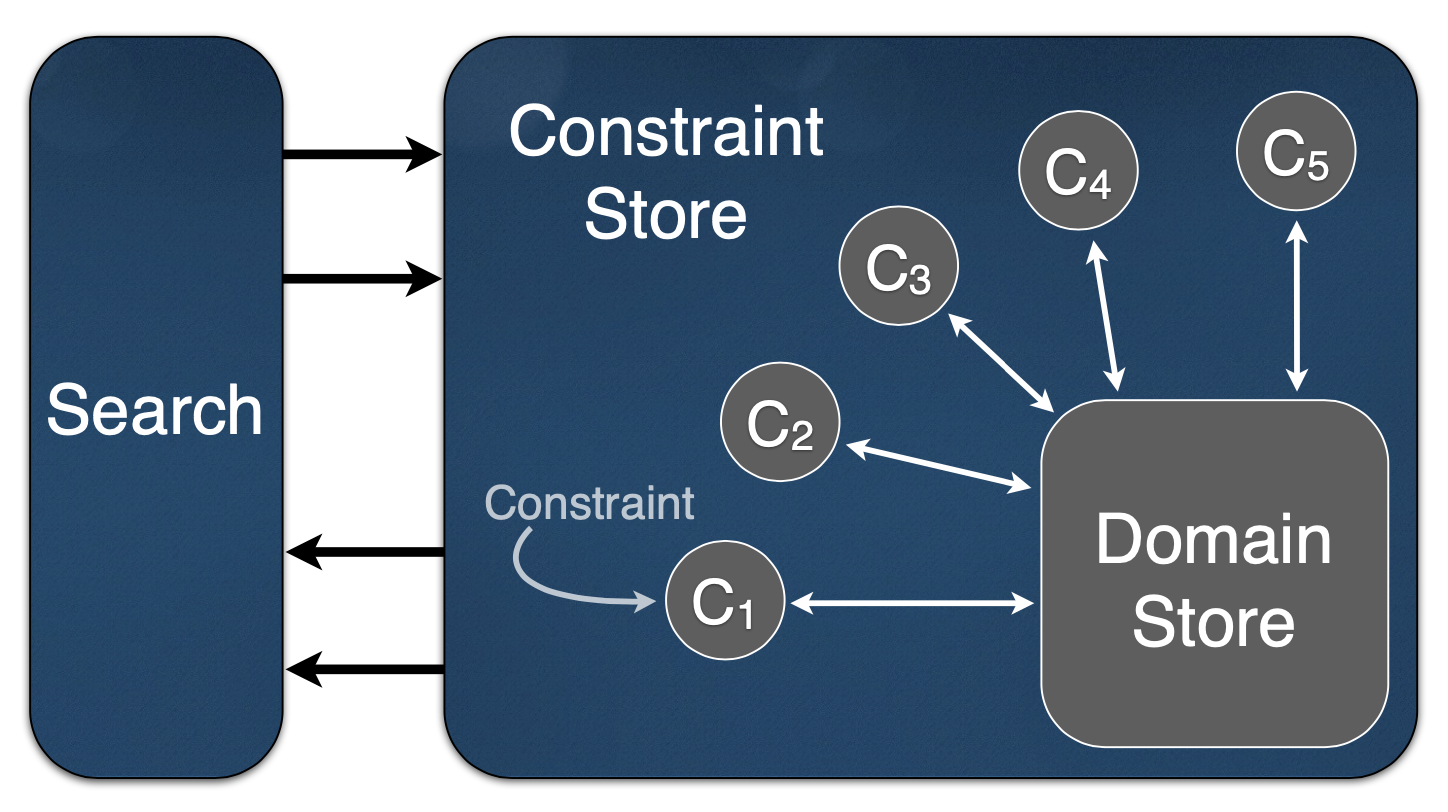
约束规划是指使用约束来限制决策变量可以取的值。这种方法可以精细地刻画问题的子结构,并且把尽可能多的关于问题的结构告诉求解器,从而求解器可以自动探索问题。
可满足性问题
一般来说,约束规划把需要做出的决策排成一个顺序,然后
- 在剩余的决策空间中作出决策
- 将新的决策进行约束传播,直至不动点
- 检查约束是否都能被满足
- 利用已知的信息来减少下一个决策的空间
- 在一个约束编程的系统中,每一种约束都有一个专门的算法来做这两件事情
- 决策可能是错误的,如果无法满足约束,就回溯到上一个决策
优化问题和可满足性问题的关系
约束规划主要着眼于约束。
首先通过求解一系列可满足性问题来取得一个解,然后增加一个「需要比�当前的解更好」的条件,继续搜索。
理论上它可以找到最优方案,但只有在新约束可以很好地减小搜索空间的时候好用
约束传播
约束传播本质上类似于一个不动点算法:
- 每次选一个约束
- 如果 在当前的域下不可行,返回失败
- 运行 的剪枝来更新可行域
- 直到没有任何新的约束可以用来剪枝,返回成功
实例
线性约束
对于如下的线性约束:
其中 ,则
- 可行性测试:,并且我们把这两边分别记为
- 剪枝:
重化
重化是指将一个约束变换为一个二值的变量,如果结束为真则值为 1,否则为 0。
这等价于引入一个新的变量 ,并且加以约束:
元素约束
可以用变量或者变量的表达式来索引一个数组,例如
约束的逻辑结合
可以用 来连接两个约束
全局约束
全局约束是指能揭示问题的某种全局结构的约束,它可以把问题结构更清晰地告诉求解器,这样就不用再次发现这些结构。全局约束在一定程度上解决了约束之间独立检验、不能相互交流的问题,可以更好地检验可行性或者剪枝。
- alldifferent:多个变量各不相同
- 表格约束:多个变量组合起来只能取特定的组合值,不是独立的
冗余约束
冗余约束是在语义上冗余(不排除任何解)但是计算上有价值的约束
- 表达解的某种性质,从而更好地传播约束
- 提供一个更高的视角,结合现有的约束,从而提高沟通
性质
对称性破缺
有时候问题中存在对称性,如果不加以注意,有可能会出现重�复搜索的情况。通常的解决办法是增加一些额外的约束,以使得不重复进行这些约束,这被称为对称性破缺。